首页
通用人形
机器狗
零部件
行业应用
资讯动态
关于我们
服务中心
关于我们
加入我们
采购/合作
首页
通用人形
机器狗
零部件
行业应用
资讯动态
关于我们
服务中心
关于我们
加入我们
采购/合作
MagicBot
让机器人成为人类进步的引擎
国内首台
实现多机协作的通用人形机器人
多机协同作业,赋能柔性生产,高效应对复杂工业场景
全场景环境感知,无惧复杂挑战
超声波传感器+激光雷达+鱼眼相机*3+头&腰部RGBD相机,精准捕捉环境细节
自研导航算法,智能适配各种复杂地形与场景
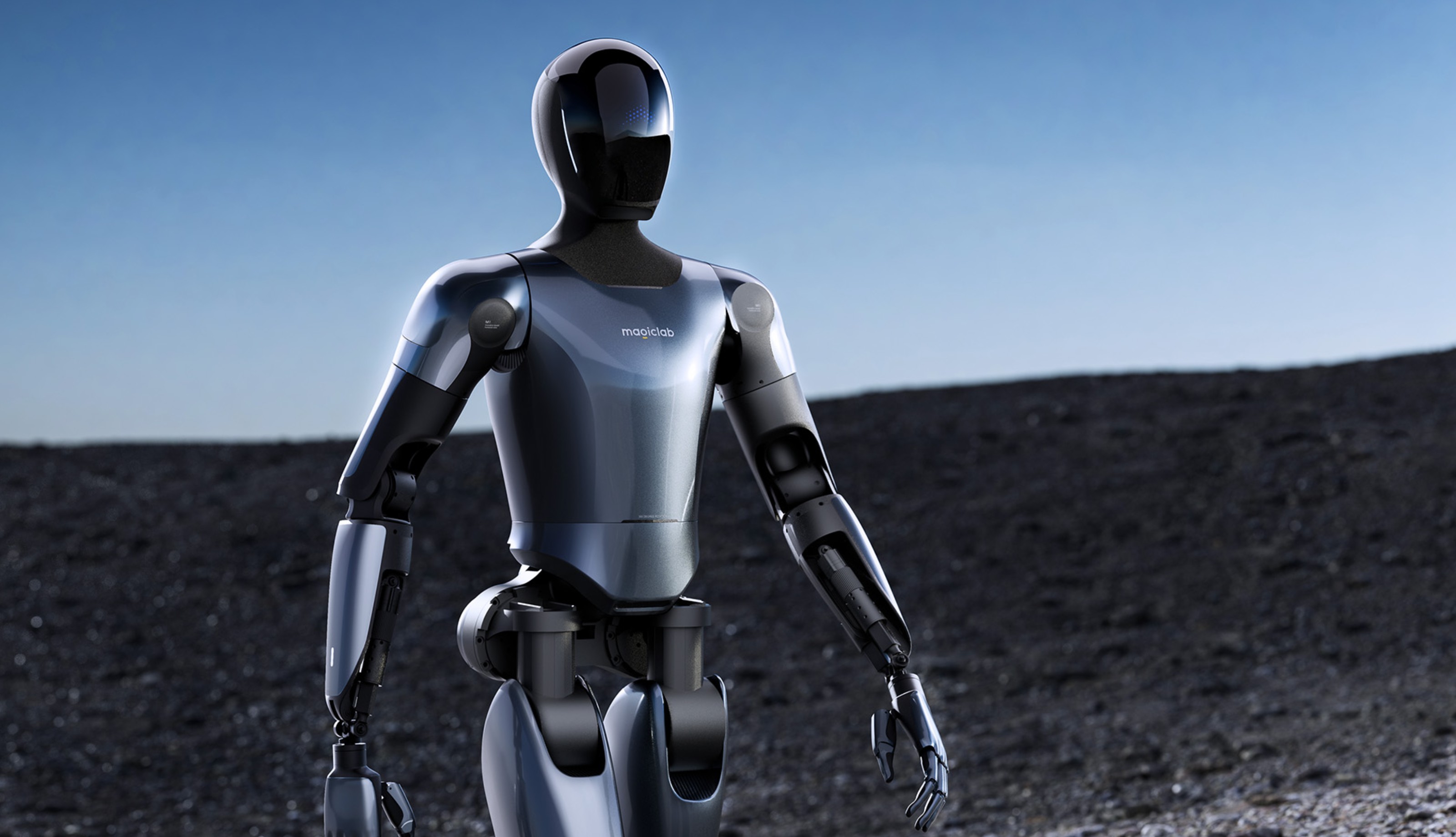
卓越的整机性能,定义行业新标杆
42个自由度设计,双臂搬运负重达20公斤,全身负重达40公斤
高性能驱动系统,保障连续作业的稳定性与效率
优雅与稳定并存的动态行走能力
行业领先的运动控制网络,支持自学习优化行走姿态
强大的动态抗干扰和抗冲击能力,平稳穿越复杂地形
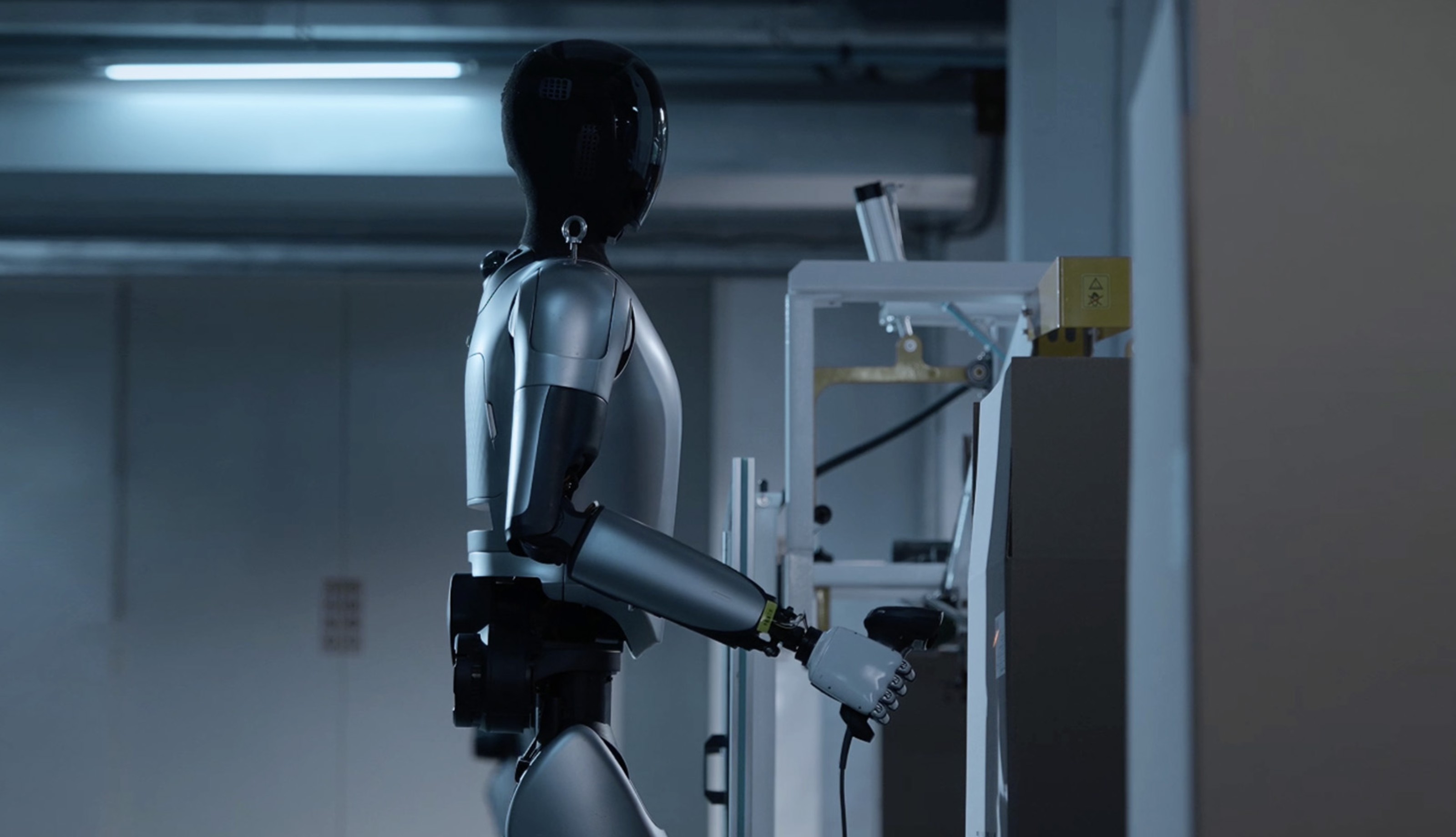
精密操作能力,突破精细作业边界
基于6D视觉伺服与全身模仿学习浮动基座设计,动作精准执行
灵活适配多种落地场景,从高精度到复杂操作需求全面覆盖
版本
MagicBot-Gen1
尺寸
高宽厚(站立)
单臂臂展
大腿+小腿长度
174 × 58 × 28cm
80cm(肩部一关节中心至指尖)
51cm+45cm
重量
整机重量
67.5kg
CMF
材质信息
减速器
主体结构铝合金,外观塑料件PC+ABS
行星减速器/谐波减速器
性能参数
峰值扭矩密度
最大关节扭矩
运动速度
>194N.m/kg
350N.m
>2m/s
算力模块
高算力模组
8核 + 8核 CPU 100TOPS AI算力
电池&续航
电池容量
充电时长
续航时间 - 持续运动
25Ah(1.35Kwh)
3h
4-5h
自由度
总自由关节度
脖子自由度
单手臂自由度
单手自由度
腰部自由度
单腿自由度
42(主动自由度)
2(Yaw轴x1 + Pitch轴x1)
7(肩关节x3 + 肘关节x1 + 腕关节x3)
11(6个主动自由度,5个被动自由度)
2(Yaw轴x1+ Roll轴x1)
6(髋关节×3 + 膝关节×1 + 踝关节×2)
通讯模块
WiFi
4G/5G模组
蓝牙
WiFi6
4G/5G
BT5.2
软件功能
可运动地形
语音交互
视觉交互
多机协作
自主导航
自主避障
地图构建
地图管理
智能OTA升级
二次开发
操作设备
全地形
语音指令、Chatbots,智能语音导购
人体识别
支持
支持
支持
手动建图
支持
支持
支持
手机、平板(Android & iOS)/ 遥控器
*运动速度、最大载荷、续航为实验室环境下所测得。
*以上参数,在不同业务场景、不同型号参数配置等情况,在应用中有所差异,请以实际为准。